Personal Project
This is a small project I did during winter break. I wanted to learn the structure behind making Graphical User Interfaces and wanted a project that would actually have a purpose for the GUI.
Many of the decisions behind this project were based on the resources I had at hand at the time and my minimal budget. I first made the whole robot and connected a joystick to it test and calibrate the servos. Once I was satisfied with the movement I moved on with the GUI to control it autonomously.
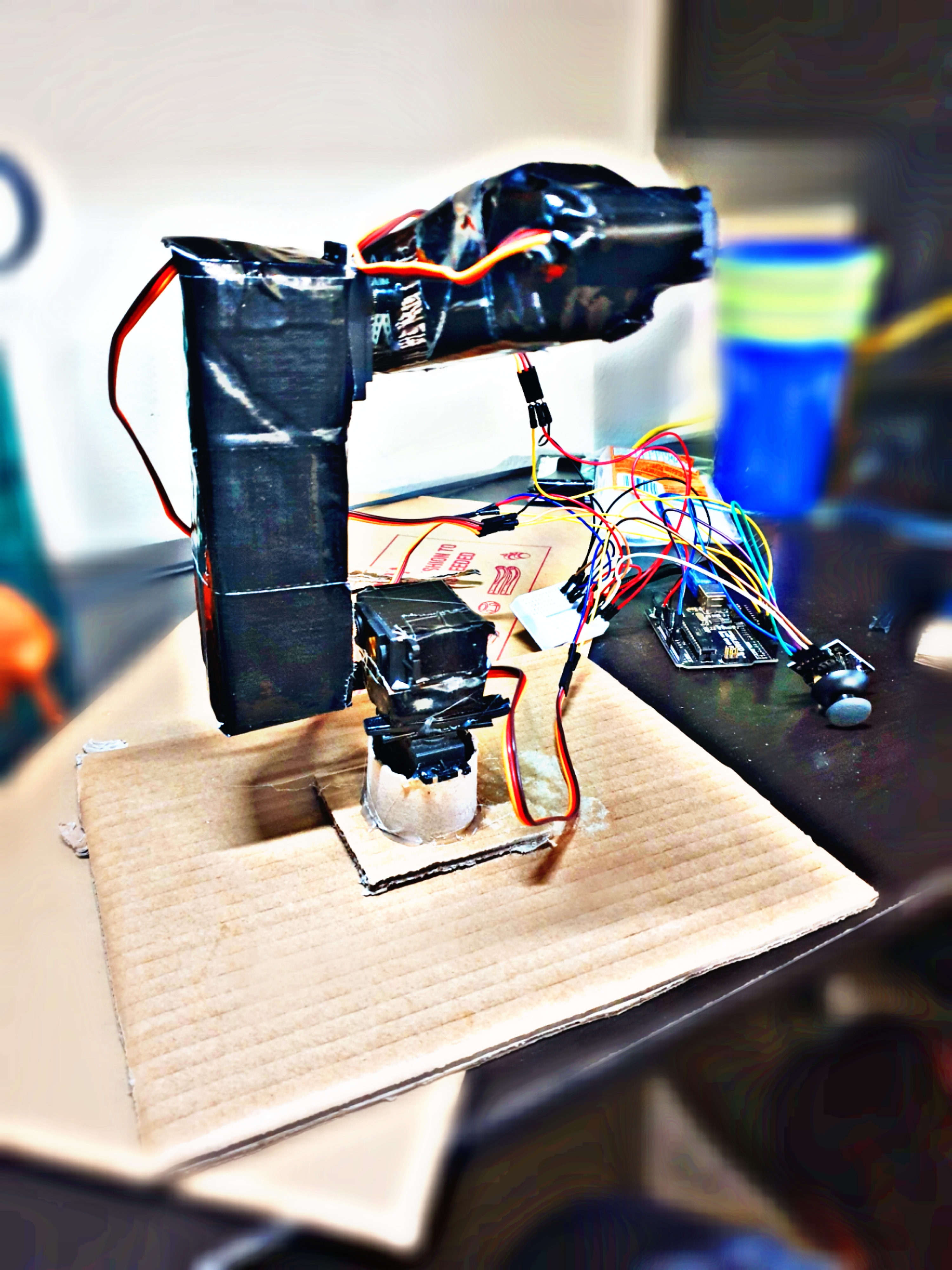
The day I started the project I set the final goal for the arm to be able to feed me some McDonald's french fries. The first video shows me proudly achieving my goal and the second one is just a recording of me saving the positions and programming the arm. There is a scary amount of wobble which is justified when cardboard and duct tape is your skeleton. If I were to revisit this project, I will definitely use 3D printed components and maybe calibrate the servors a little better so that the movements look more calculated rather than random jerks.
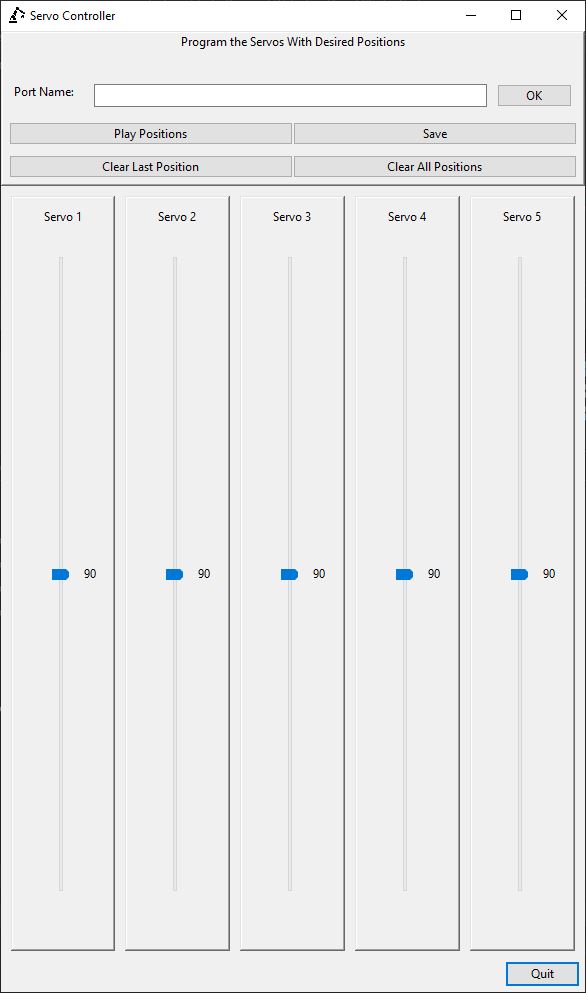
This simple GUI is basically the only reason I did the project. I used wxwidgets API as it supported C++ which was the only language I was comfortable with at the time.
The sliders are used to control the positions of the five servos and the ones I had go +/- 90°. Once you have a desired position, you can save it and after you have recorded a certain number of positions you can hit play and watch the arm playback all the positions to perform an autonomous action. The text box at the top specifies the serial port of your laptop/PC the Arduino is connected to.
Code